Ground Control Points¶
Ground Control Points are simply a way of mapping a known coordinate in the real world (ideally in very accurate coordinates such as ECEF), to a pixel on an image for georeferencing.
When multiple GCPs are used together in the final stitching of drone flight imagery together, the final georeferencing should be very accurate.
Further details can be found on the OpenDroneMap docs page about GCPs
GCP Target Placement¶
Ground control points are used to ensure high positional accuracy of the final drone image in case PPK or RTK tools are not available. GCPs are a set of identifiable features in the collected images with known spatial coordinate information. GCPs are normally collected with survey-grade GPS devices that provide centimetre-level precision. These features can be either existing physical objects (e.g. a corner of a road intersection) or custom targets manually positioned in advance of a drone survey across the target area of interest.
Best practices for GCP placement:
- Distribution: GCPs should be well distributed across the area of interest; otherwise, they could end up skewing the positional accuracy of the final images.
- Visibility: Targets should be large enough to be seen in multiple (at least three) overlapping aerial shots.
- Anchoring: Targets should be anchored to the ground so they are not accidentally moved by people or wildlife. Depending on the environment, it is good practice to include a note next to each target that explains its purpose; this should minimise interference from residents.
- Access: The manual positioning of custom targets can be very time-consuming, as it requires identifying access routes to the areas where targets should be placed, then recording each location with an accurate GPS device.
When to use RTK/PPK instead of GCPs¶
When the timeliness of the data is important, setting up ground control points to achieve high absolute accuracy may not be cost- or time-effective. In these situations, a drone equipped with an RTK or PPK system should be used instead.
Real-Time Kinematic (RTK) allows high-precision measurements of locations by using a base station with known coordinates to send and receive correction data via a radio link, performing "live" triangulation corrections while the drone is flying. Post-Processed Kinematic (PPK) is similar to RTK, except that the corrections to the GPS positions are calculated not during but after the flight.
When do you need GCPs?¶
- Visual / 2D mapping (OpenAerialMap uploads, OpenStreetMap tracing): GPS-only flights are fine. Consumer GPS provides roughly 1-3 m horizontal accuracy, which is sufficient for these use cases.
- DSM / DTM / 3D products, accurate footprints, or cross-task alignment: GCPs (5-8 pre-marked targets distributed across the area of interest, surveyed with RTK) or an RTK-capable drone should be standard. GCPs transform output accuracy from ~1.5 m horizontal / variable vertical to ~5-10 cm in both, and resolve doming and altitude-step artefacts.
Adapted from: World Bank and Humanitarian OpenStreetMap Team (2019). Technical Guidelines for Small Island Mapping with UAVs. CC BY 4.0.
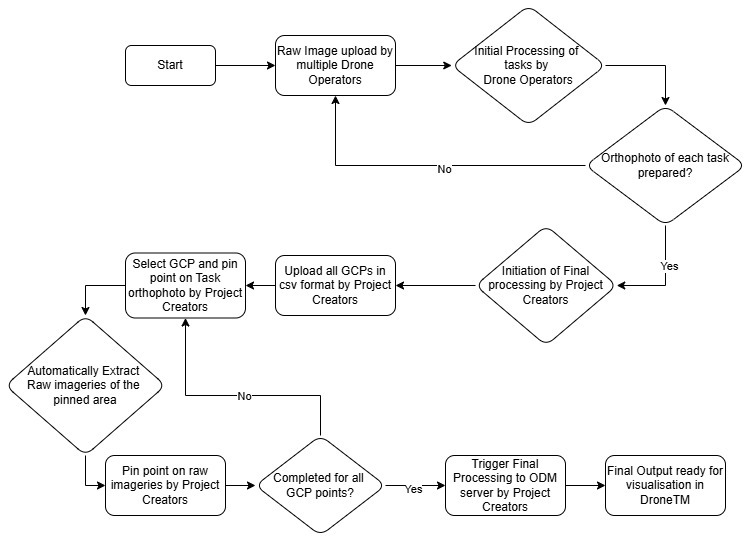
Our Workflow¶